מבוא לחשבון וקטורי
חשבון וקטורים משמש לניתוח סיטואציות במכניקה:
בגדול, כשאנחנו מסתכלים אחד על השני פה, אין לנו שום וקטור בינינו… זה אנחנו לא רואים, זה תוספת שלנו, אנושית, של המנתחים למה שקורה, וזה עוזר לנו להבין וגם לנבא מה הולך לקרות.
דרגות חופש והצירים הניצבים
- בעולם שלנו יש 3 דרגות חופש
- “כשאני נע, או כוחות שגורמים לי להאיץ בכיוון ציר מסוים, אם אני לוקח ציר ניצב, הציר הניצב לא יודע מה קורה בציר השני”
- מספר דרגות החופש של מרחב קובע את כמות הצירים שמתארת אותו
- כל דרגת חופש מייצגת מידע חדש שלא ניתן להביא מדרגות החופש האחרות
- אם אחד הצירים משפיע על מה שקורה בציר אחר, הם אינם ניצבים
- צירים ניצבים = עצמאיים, כל אחד לא משפיע על האחר
הגדרת וקטור והתכונות שלו
- וקטור מאופיין על ידי שני גדלים:
- גודל (אורך הוקטור)
- כיוון (אוריינטציה במרחב)
- וקטור במרחב תלת־ממדי מתואר על ידי שלושה מספרים (קומפוננטות)
-
אורך וקטור נקבע לפי משפט פיתגורס:
\[\vert \vec{A}\vert = \sqrt{A_x^2 + A_y^2 + A_z^2}\] - וקטורי יחידה מוגדרים כווקטורים שאורכם 1:
- $\hat{x} = (1,0,0)$
- $\hat{y} = (0,1,0)$
- $\hat{z} = (0,0,1)$
-
וקטור יחידה בכיוון כלשהו:
\[\hat{v} = \frac{\vec{v}}{\vert \vec{v}\vert}\]
פעולות עם וקטורים
- מכפלה של סקלר בוקטור: $\alpha\vec{A} = (\alpha A_x, \alpha A_y, \alpha A_z)$
- אם $\alpha > 1$: מתיחה של הוקטור
- אם $0 < \alpha < 1$: כיווץ של הוקטור
- אם $\alpha < 0$: הפיכת כיוון (פליפ) ושינוי אורך
- חיבור וקטורים: $\vec{A} + \vec{B} = (A_x + B_x, A_y + B_y, A_z + B_z)$
- חיסור וקטורים: $\vec{A} - \vec{B} = (A_x - B_x, A_y - B_y, A_z - B_z)$
בעיה 1: שחיין חוצה נהר
שחיין חוצה נהר מדרום לצפון במהירות $1\left[ \frac{m}{s} \right]$ והנהר זורם ממערב למזרח במהירות $5\left[ \frac{m}{s} \right]$.
- איזו מערכת צירים מתאימה לבעיה
- כמה דרגות חופש נדרשות לתיאור? מדוע הזנחנו דרגת חופש
- האם מהירות הזרם מושפעת ממהירות השחיין
- האם מהירות החציה מושפעת ממהירות הזרם?
- האם שני הצירים שבחרנו לתאר את הבעיה ניצבים זה לזה?
- איזו מהירות יזהה צופה חיצוני שיש לשחיין? האם תדעו לחשב את כיוונה?

פתרון:
- מערכת צירים קרטזית:
- ציר $x$ במזרח (כיוון הזרם)
- ציר $y$ בצפון (כיוון השחיין)
- דרגות חופש:
- שתי דרגות חופש בלבד $(x,y)$
- הזנחנו את הציר האנכי $(z)$ כי הבעיה מתרחשת במישור
- מציאותית, יש אולי שינויי גובה במים, אבל הם פחות מעניינים לבעיה הנוכחית
-
מהירות הזרם אינה מושפעת מהשחיין (בהנחה שהנהר גדול מספיק)
-
מהירות החצייה אינה מושפעת מהזרם:
בכל צעד שהוא עושה, למרות שהוא נסחף, שום דבר לא יזיז אותו אחורה או קדימה. אין את ההתערבות של המים בקצב ההתקדמות שלו בציר $y$. הוא הלך קדימה מטר, נסחף חמישה, הלך קדימה מטר, נסחף חמישה… זה אותו דבר מבחינת הזמן שלקח לו לעבור את הגדה.
-
הצירים ניצבים זה לזה - השפעת הזרם לא משנה את המהירות של השחיין לכיוון צפון-דרום
-
המהירות הכוללת של השחיין:
\[\boxed{V^2 = V_x^2 + V_y^2 = 5^2 + 1^2 = 26 \, \mathrm{[m/s]}^2}\] \[\vert \vec{v} \vert = \sqrt{26} \text{ [m/s]} \approx 5.1 \text{ [m/s]}\]הערה: שימו לב להבדל בין $v = \text{speed}$ (מהירות) לבין $\mathbf{v} = \text{velocity}$ (וקטור מהירות):
- $v=\vert\mathbf{v}\vert$ היא גודל בלבד (ללא כיוון)
- $\mathbf{v}=\vec{v}$ היא וקטור עם גודל וכיוון
- במקרה זה, $\vec{V} = (5, 1)$
- וקטור יחידה בכיוון התנועה:
הכיוון:
\[\tan(\theta) = \frac{V_y}{V_x} = \frac{1}{5} = 0.2\] \[\theta = \arctan(0.2) \approx 11.3° \mathrm{[degrees]}\]
המרצה מוסיף
כאשר $x$ קרוב ל־0, אפשר לקרב: $\sin(x) \approx x$ ו־$\cos(x) \approx 1$
בעיה 2: כריש רודף טרף
טרף של כריש שוחה אחריו בהתלהבות במורד האוקיאנוס בכדי להזכיר לו שהוא צריך לרדוף אחריו ולא להיפך. מהירות הכירוש היא $5 \left[ \frac{m}{s} \right]$ שמאלה, $2 \left[ \frac{m}{s} \right]$ למטה ו $3 \left[ \frac{m}{s} \right]$ החוצה. מהירות הטרף היא ב־$10\% $ גבוהה יותר בכל כיוון.
- מהם רכיבי המהירות של הטרף? כיצד נרשום זאת בצורה וקטורית?
- מהו גודל המהירות שלו? מהו וקטור היחידה בכיוון תנועתו?
- רשום בכתיב וקטורי את המהירות היחסית בין הגיבורים של העלילה. מהו גודל המהירות היחסית הכולל?
- האם הטרף משיג את הכריש? אז מה יקרה?
פתרון:
-
רכיבי מהירות הטרף:
\[\vec{v}_{\text{shark}} = (-5, -2, 3) = -5\hat{x} - 2\hat{y} + 3\hat{z}\] \[\vec{v}_{\text{food}} = (-5.5, -2.2, 3.3) = -5.5\hat{x} - 2.2\hat{y} + 3.3\hat{z}\] -
גודל המהירות של הטרף:
\[\vert \vec{v}_{\text{food}}\vert = \sqrt{(-5.5)^2 + (-2.2)^2 + (3.3)^2} = \sqrt{30.25 + 4.84 + 10.89} = \sqrt{45.98} \approx \sqrt{46} \text{ [m/s]} \approx 6.8 \text{ [m/s]}\]וקטור היחידה (וקטור מנורמל):
\[\hat{v}_{\text{food}} = \frac{\vec{v}_{\text{food}}}{\vert \vec{v}_{\text{food}}\vert} = \left(\frac{-5.5}{\sqrt{46}}, \frac{-2.2}{\sqrt{46}}, \frac{3.3}{\sqrt{46}}\right) \approx (-0.81, -0.32, 0.49)\](ניתן לבדוק שאכן האורך הוא 1)
-
המהירות היחסית:
\[\Delta\vec{v} = \vec{v}_{\text{shark}} - \vec{v}_{\text{food}} = (-5, -2, 3) - (-5.5, -2.2, 3.3) = (0.5, 0.2, -0.3)\] \[|\Delta\vec{v} \vert = \sqrt{0.5^2 + 0.2^2 + 0.3^2} = \sqrt{0.25 + 0.04 + 0.09} = \sqrt{0.38} \approx 0.616 \text{ [m/s]}\] -
כאשר הכריש מהפך את כיוונו:
\[\vec{v}_{\text{shark\_new}} = (5, 2, -3)\] \[\Delta\vec{v}_{\text{חדש}} = \vec{v}_{\text{shark\_new}} - \vec{v}_{\text{food}} = (5, 2, -3) - (-5.5, -2.2, 3.3) = (10.5, 4.4, -6.6)\] \[|\Delta\vec{v}_{\text{new}}\vert = \sqrt{10.5^2 + 4.4^2 + 6.6^2} \approx 13 \text{ [m/s]}\]
מסקנה:
- כריש פחות מסוכן למגלן (הצופה) והטרף מסוכן יותר לכריש מאשר להיפך
- הטרף לא ישיג את הכריש כיוון שבכל הצירים הוא מצמצם מרחק (המהירות היחסית היא 0.616 מ’/ש’)
- אם הכריש משנה את כיוונו, הוא ממשיך באותו כיוון והמהירות היחסית החדשה בין הגיבורים היא גדולה הרבה יותר (13 מ’/ש’)
מערכות קואורדינטות שונות
קואורדינטות גליליות.
הביטוי באיור מעלה בנקודה $P$ אשר מרחקה מהראשית הוא $r$. הוקטור היוצא מהראשית ומצעי אל הנקודה הזו נתון בביטוי
\[\vec{r} = x \hat{x} + y \hat{y} + z \hat{z}\]כאשר $\left(x,y,z\right)$ הן קואורדינטות קרטזיות של הנקודה $P$. תהיינה $\left(\rho,\theta,\phi\right)$ קואורדינטות חדשות כמתואר באיור. הצמד $\left(\rho,\theta\right)$ מכונה קואורדינטות קוטביות (ולעיתים קרובות גם קואורדינטות פולריות). והשלשה $\left(\rho,\theta,\phi\right)$ מכונה קואורדינטות גליליות (ולעיתים קרובות גם קואורדינטות צילינדריות).
הראו את נוסחאות המעבר:
\[\begin{aligned} x &= \rho \cos\phi \\[10pt] y &= \rho \sin\theta \\[10pt] \rho &= \sqrt{x^2 + y^2} \\[10pt] \theta &= \arctan\left(\frac{y}{x}\right) \end{aligned}\]קבלו את הקשר הפיתגוראי
\[r^2 = \rho^2 + z^2 = x^2 + y^2 + z^2\]
 |
|---|
| קואורדינטות גליליות |
תיאור קרטזי וקואורדינטות פולריות/גליליות
המרצה מסביר:
XYZ זה קרטזי, $r$ (radius), $\theta$ (theta), ו־$\phi$ (phi) וכל מיני כאלה זה פולרי… כשאת זזה במעגלים, המיקום $X$ שלך וה־$Y$ משתנים כל הזמן. אבל אם אתה מנסה להביע את זה בעזרת $r$ ו־$\theta$, הדבר היחידי שישתנה זה $\theta$. ואם יש מהירות קבועה, אז ה־$\theta$ תשתנה באופן קבוע.
קואורדינטות גליליות:
- נקודה $P = (\rho, \theta, z) = (x, y, z)$
-
הקשרים בין הקואורדינטות:
\[x = \rho \cos \theta\] \[y = \rho \sin \theta\] \[\rho = \sqrt{x^2 + y^2}\] \[\theta = \tan^{-1}\left(\frac{y}{x}\right)\] \[r^2 = \rho^2 + z^2 = x^2 + y^2 + z^2\] - $(\rho,\theta)$ מכונה קואורדינטות קוטביות (פולריות)
- השלשה $(\rho,\theta,z)$ נקראת קואורדינטות גליליות
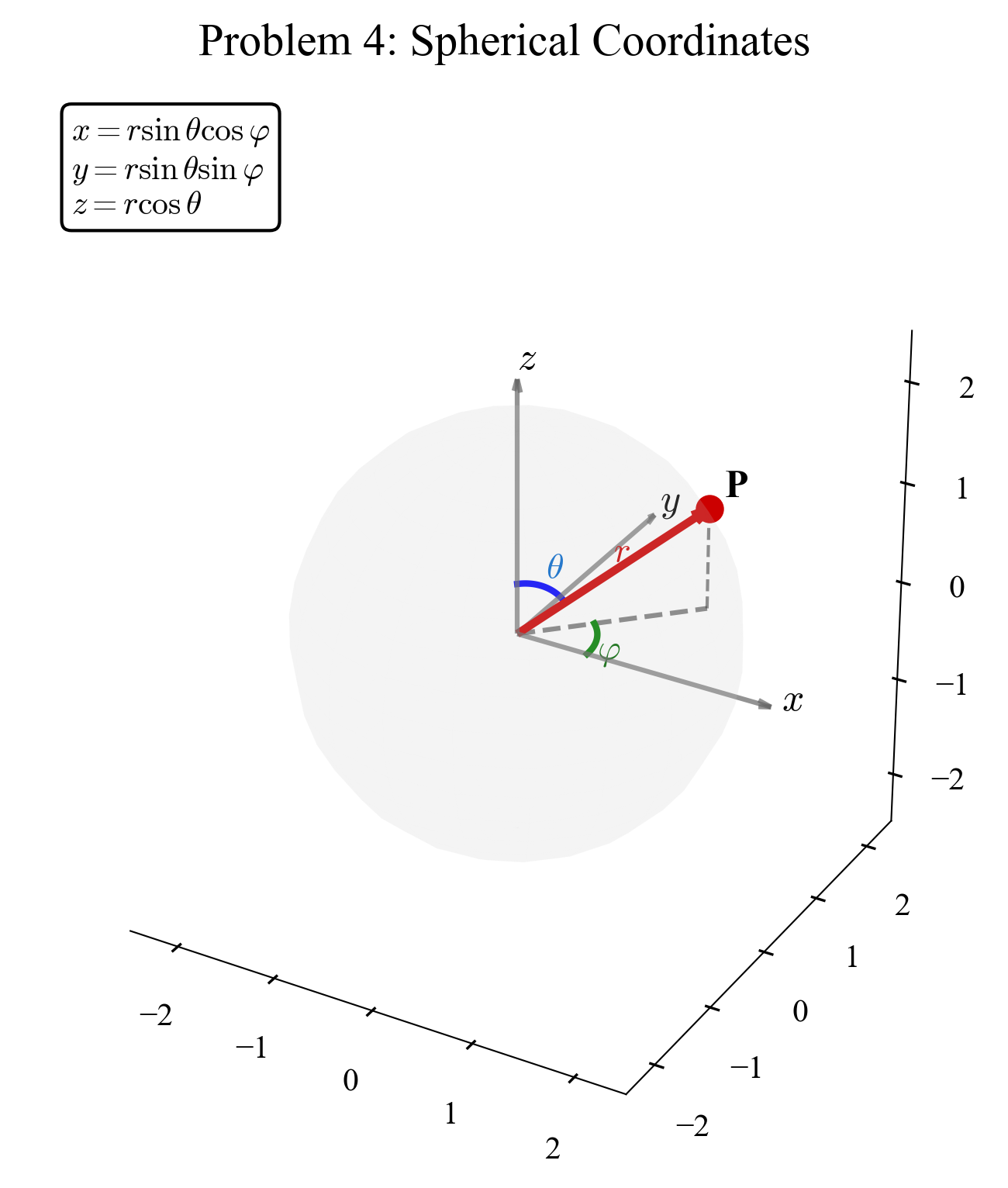
- קואורדינטות כדוריות מוגדרות כ־$(r, \theta, \phi)$ כאשר $\phi$ היא הזווית ביחס לציר $z$
יתרונות קואורדינטות פולריות:
- נוחות לתיאור תנועה מעגלית
- כאשר גוף נע במעגל, רק $\theta$ משתנה ו־$\rho$ נשאר קבוע
- בתנועה מעגלית במהירות קבועה, $\theta$ גדל באופן קבוע (מהירות זוויתית קבועה)
בעיה 3: מסלול ראלי
Road Rally Problem
The figure below gives an incomplete map of a road rally. From the starting point (at the origin), you must use available roads to go through the following displacements:
- $\vec{a}$ to checkpoint Able, magnitude $36$ km, due east.
- $\vec{b}$ to checkpoint Baker, due north.
- $\vec{c}$ to checkpoint Charlie, magnitude $25$ km, at the angle shown.
The magnitude of your net displacement $\vec{d}$ from the starting point is $62.0$ km. What is the magnitude $b$ of $\vec{b}$?
נתון: מפה לא מלאה של מסלול ראלי. מנקודת התחלה (בראשית הצירים), עליך לנסוע דרך ההעתקים הבאים:
- וקטור $\vec{a}$ לנקודת ציון Able, גודל 36 ק”מ, מזרחה
- וקטור $\vec{b}$ לנקודת ציון Baker, צפונה
- וקטור $\vec{c}$ לנקודת ציון Charlie, גודל 25 ק”מ, בזווית 135°
ההעתק הכולל $\vec{d}$ מנקודת ההתחלה הוא 62.0 ק”מ. מהו הגודל $b$ של וקטור $\vec{b}$?
פתרון:
הרעיון המרכזי: ההעתק הנטו $\vec{d}$ הוא סכום וקטורי של שלושת ההעתקים הבודדים:
\[\vec{d} = \vec{a} + \vec{b} + \vec{c}\]ניתן לפרש זאת במונחי קואורדינטות:
\[\vec{a} = (36, 0)\] \[\vec{b} = (0, y_B)\] \[\vec{c} = (25\cos(135), 25\sin(135)) = \left(-\frac{25}{\sqrt{2}}, \frac{25}{\sqrt{2}}\right)\]לכן:
\[(x_C, y_C) = (36, 0) + (0, y_B) + \left(-\frac{25}{\sqrt{2}}, \frac{25}{\sqrt{2}}\right)\] \[x_C = 36 - \frac{25}{\sqrt{2}}\] \[y_C = y_B + \frac{25}{\sqrt{2}}\]לפי הנתון:
\[x_C^2 + y_C^2 = 62^2\]מציבים:
\[\left(36 - \frac{25}{\sqrt{2}}\right)^2 + \left(y_B + \frac{25}{\sqrt{2}}\right)^2 = 62^2\]פיתוח:
\[62^2 = \left(36 - \frac{25}{\sqrt{2}}\right)^2 + \left(y_B + \frac{25}{\sqrt{2}}\right)^2\] \[\Rightarrow \sqrt{2}y_B + 25 = \sqrt{2 \cdot 62^2 - (\sqrt{2} \cdot 36 - 25)^2} = 83.75\] \[\Rightarrow y_B = \frac{83.75 - 25}{\sqrt{2}} = 41.55\] \[\Rightarrow |b| = |y_B| = 41.55 \text{ [km]}\]בדיקה:
\[b^2 = (x_B - x_A)^2 + (y_B - y_A)^2 = (0 - 36)^2 + (41.55 - 0)^2 = 36^2 + 41.55^2\]אך נכון יותר: $\vert b \vert = y_B = 41.55 \, \mathrm{[km]}$
דור פסקלחשוב: מערכת צירים היא בחירתנו ועדיף לבחור בזו שתקל עלינו.