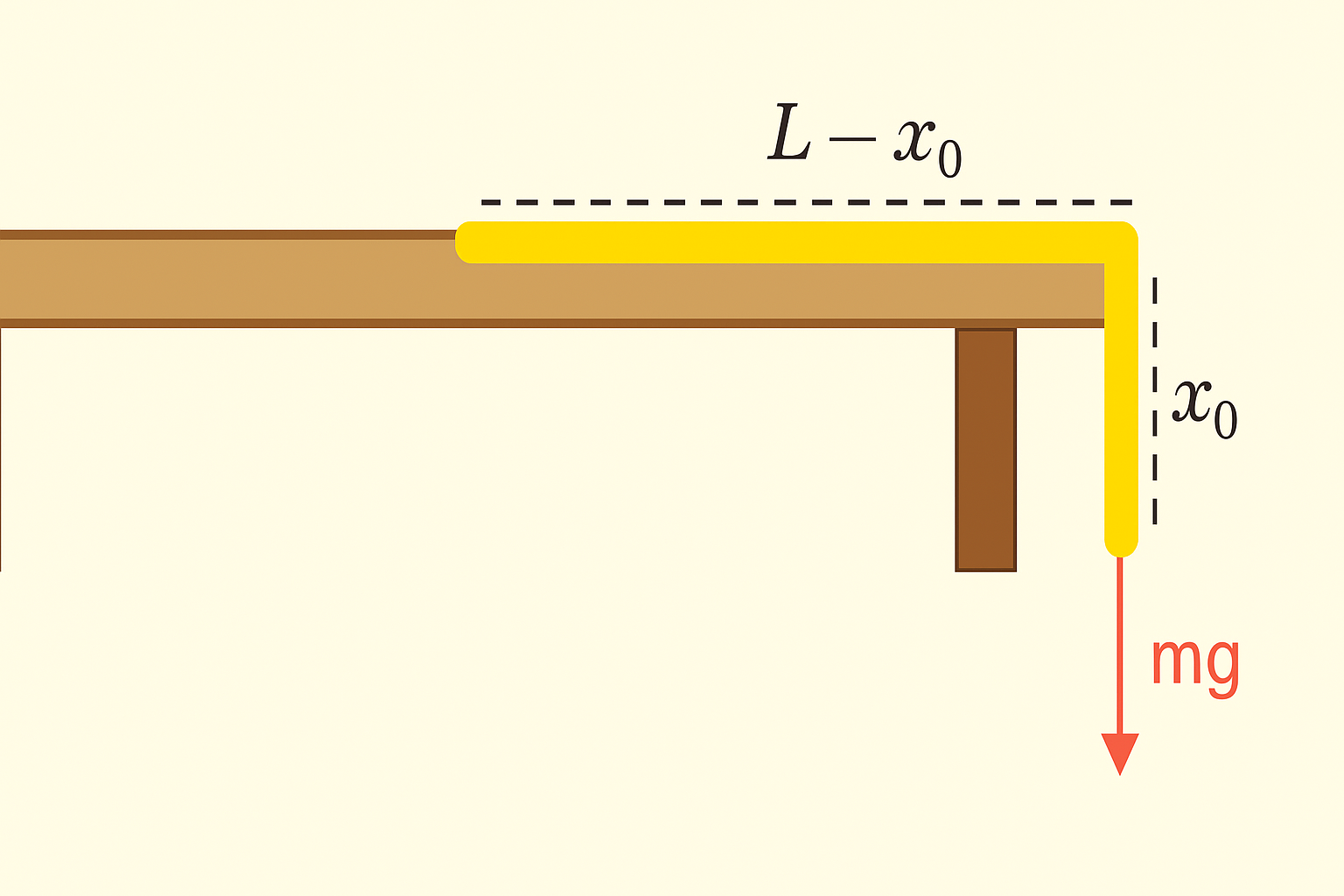
בעיית החבל המשתלשל
נניח שחבל משתלשל מקצה של שולחן. הפרמטרים והיחידות שלהם:
- $L\ \mathrm{m}$ - אורך החבל הכולל
- $g\ \mathrm{m/s}^2$ - תאוצת הכבידה
- $x(t)$ - אורך החבל המשתלשל (מחוץ לשולחן) בזמן $t$
- $\rho\ \mathrm{[kg/m]}$ - צפיפות החבל
- $t\ \, \mathrm{s}$ - זמן
- $v(t)\ \mathrm{m/s}$ - מהירות החבל
הערה מקדימה: צורת ביטוי אחרת, שהמרגל השתמש בה, אינה משתמשת בצפיפות החבל אלא מציגה את המאסה מהאורכים היחסיים של החלקים:
- $\frac{L-x(t)}{L}m$ - החלק של החבל שעל השולחן
- $\frac{x(t)}{L}m$ - החלק של החבל המשתלשל
אישית מצאתי את צורת הביטוי הזו אינטואיטיבית יותר. בכל מקרה הפרמטר של המשקל הצטמצם.
תנאי התחלה ($t=0$)
\[\begin{cases} x(0) = x_0\ \mathrm{m} \\[10pt] \dot{x}(0) = v(0) = 0\ \mathrm{m/s} \end{cases}\]אנחנו מניחים שהחבל מתחיל ממנוחה, כלומר המהירות ההתחלתית היא אפס, וצריכים למצוא:
- $v(t)\ \mathrm{m/s}$ - מהירות החבל בזמן $t$
- $x(t)\ \mathrm{m}$ - אורך החבל המשתלשל בזמן $t$
- $T\ \, \mathrm{s}$ - זמן ההחלקה המלאה של החבל מהשולחן (כאשר $x(T) = L$)

תחילה נניח שאין חיכוך. נסמן:
- $m = \rho L$ - המסה הכוללת של החבל [ק״ג]
- $\overset{*}{m} = \rho x$ - המסה של החלק המשתלשל [ק״ג]
נתבונן בכוחות הפועלים על המערכת:
- כוח הכבידה על החלק המשתלשל: $F_g = \overset{*}{m} g = \rho x g \left[\mathrm{N}\right]$
- אין חיכוך בין החבל לשולחן
לפי החוק השני של ניוטון, הכוח השקול מייצר תאוצה בכל המסה של החבל. בצורה הכללית של החוק השני של ניוטון:
\[\underbrace{F}_{\text{force}} = \underbrace{m}_{\text{mass}} \cdot \underbrace{a}_{\text{velocity}} \tag{1}\]נציב את הערכים המתאימים במשאוואה $(1)$:
\[\underbrace{\rho x(t) g}_{\text{forces on the rope}} = \underbrace{\rho L}_{\text{rope mass}} \cdot \underbrace{\ddot{x}(t)}_{\text{rope velociry}} \tag{2}\]נסביר את משוואה $(2)$:
-
הכוח הפועל: $\underbrace{\rho x g}_{\text{weight of the falling part}}$
- $\rho$ = צפיפות החבל [ק״ג/מטר]
- $x(t)$ = אורך החלק המשתלשל בזמן $t$ [מטר]
- $g$ = תאוצת הכבידה [מטר/שנייה²]
-
המסה המואצת: $\underbrace{\rho L}_{\text{rope velocity}}$
- $\rho$ = צפיפות החבל [ק״ג/מטר]
- $L$ = האורך הכולל של החבל [מטר]
-
התאוצה: $\underbrace{\ddot{x}}_{\text{2nd derivient of }x\text{ in time t}}$
נפשט את משוואה $(2)$:
\[\begin{aligned} \rho x g &= \rho L \ddot{x} \\[10pt] \ddot{x} &= \underbrace{\frac{g}{L}}_{\text{constant}} \cdot \underbrace{x}_{\text{falling part length}} \end{aligned}\]זוהי המשוואה הדיפרנציאלית המתארת את תנועת החבל. אם נסמן $\omega^2 = \frac{g}{L}$, נקבל:
\[\ddot{x} = \underbrace{\omega^2}_{\text{constant}} \cdot x \tag{3}\]היחידות של $\omega^2$ הן [1/שנייה²], מכיוון ש־$g$ הוא תאוצת הכבידה [מטר/שנייה²] ו־$L$ הוא אורך החבל [מטר].

פתרון המשוואה הדיפרנציאלית
משוואה $(3)$ היא משוואה דיפרנציאלית לינארית הומוגנית מסדר שני. הפתרון הכללי הוא:
\[x(t) = A\cosh(\omega t) + B\sinh(\omega t) \,\mathrm{m} \tag{4}\]כאשר:
- $\cosh(y) = \frac{e^y + e^{-y}}{2}$ (פונקציית הקוסינוס ההיפרבולי)
- $\sinh(y) = \frac{e^y - e^{-y}}{2}$ (פונקציית הסינוס ההיפרבולי)
- $A$ ו־$B$ הם קבועים שנקבעים לפי תנאי ההתחלה [M]
מציאת הקבועים A ו־B
נשתמש בתנאי ההתחלה כדי למצוא את הקבועים $A$ ו־$B$:
-
תנאי ראשון: $x(0) = x_0$
נציב $t = 0$ בפתרון הכללי (משוואה $(4)$):
\[x(0) = A\cosh(0) + B\sinh(0)\]מכיוון ש־$\cosh(0) = 1$ ו־$\sinh(0) = 0$, מתקבל:
\[x_0 = A \cdot 1 + B \cdot 0 = A\]לכן $\boxed{A = x_0 \ \mathrm{m}}$.
-
תנאי שני: $\dot{x}(0) = 0$
נחשב את הנגזרת של $x(t)$:
\[\dot{x}(t) = A\omega\sinh(\omega t) + B\omega\cosh(\omega t) \,\mathrm{m/s}\]נציב $t = 0$:
\[\dot{x}(0) = A\omega\sinh(0) + B\omega\cosh(0)\]מכיוון ש־$\sinh(0) = 0$ ו־$\cosh(0) = 1$, מתקבל:
\[\begin{aligned} 0 &= 0 + B\omega \cdot 1 \\[10pt] B \omega &= 0 \end{aligned}\]לכן $\boxed{B = 0 \ \mathrm{m}}$.
הפתרון המלא
כעת, כאשר $A = x_0$ ו־$B = 0$, הפתרון המלא הוא:
\[\begin{aligned} x(t) &= \underbrace{A}_{x_0}\cosh(\omega t) + \underbrace{B}_{0}\sinh(\omega t) \\[10pt] &= x_0 \cosh(\omega t) + 0 \\[10pt] &= x_0 \cosh(\omega t) \,\mathrm{m} \end{aligned}\]סך הכל:
\[\boxed{x(t) = x_0 \cosh(\omega t) \,\mathrm{m}}\]והמהירות:
\[\boxed{v(t) = \dot{x}(t) = x_0 \omega \sinh(\omega t) \,\mathrm{m/s}}\]חישוב זמן ההחלקה המלאה

זמן ההחלקה המלאה $T$ הוא הזמן שבו $x(T) = L$, כלומר, כל החבל נמצא מחוץ לשולחן:
\[x_0 \cosh(\omega T) = L\] \[\cosh(\omega T) = \frac{L}{x_0}\] \[\omega T = \cosh^{-1}\left(\frac{L}{x_0}\right)\] \[T = \frac{1}{\omega}\cosh^{-1}\left(\frac{L}{x_0}\right) = \sqrt{\frac{L}{g}}\cosh^{-1}\left(\frac{L}{x_0}\right) \,\mathrm{s}\]הסבר פיזיקלי
תנועת החבל לא בתאוצה קבועה אלא בתאוצה שגדלה עם הזמן. ככל שיותר חבל משתלשל, כך גדל הכוח המושך, וכתוצאה מכך גדלה התאוצה. זהו מקרה של ״משוב חיובי״ - תהליך שמגביר את עצמו.
ככל שהחלק המשתלשל ההתחלתי ($x_0$) גדול יותר, כך זמן ההחלקה ($T$) קטן יותר. זה הגיוני פיזיקלית כי חלק משתלשל גדול יותר מייצר כוח משיכה חזק יותר מההתחלה.
גרסה עם חיכוך
הסבר על חיכוך
החיכוך הוא כוח המתנגד לתנועה היחסית בין שני משטחים במגע. יש שני סוגים של חיכוך:
- חיכוך סטטי ($f_s$) - פועל כאשר הגוף במנוחה ומונע ממנו להתחיל לנוע
- חיכוך קינטי ($f_k$) - פועל כאשר הגוף בתנועה ומאט אותו
עוצמת כוח החיכוך הקינטי $f_k$ מתוארת על ידי:
\[f_k = \mu_k N \left[\mathrm{N}\right]\]כאשר $\mu_k$ הוא מקדם החיכוך הקינטי (חסר יחידות) ו־$N$ הוא הכוח הנורמלי.
ניתוח הכוחות עם חיכוך
הכוח הנורמלי שווה למשקל החלק של החבל שעל השולחן כפול תאוצת הכבידה (החוק השני של ניוטון):
\[\begin{aligned} N &= (m-\overset{*}{m})g \\[10pt] &= (\rho L - \rho x)g \\[10pt] &= \rho(L-x)g \left[\mathrm{N}\right] \end{aligned}\]הערה: כוחות הם וקטורים, אבל לנוחות אנחנו מתייחסים להבנתי לדברים כגדלים.
לכן, כוח החיכוך הקינטי יהיה:
\[f_k = \mu_k N = \mu_k \underbrace{\rho (L - x) g }_{N}\left[\mathrm{N}\right]\]ניעזר בחוק השני של ניוטון(הכוח השקול הפועל על גוף שווה למכפלת מסת הגוף בתאוצתו: $F = m \cdot a$), כדי לקבל משוואות תנועה עם חיכוך:
שלב 1: זיהוי הכוחות הפועלים על המערכת
הכוחות העיקריים הפועלים על החבל:
-
כוח הכובד על החלק המשתלשל ($\overset{*}{m} g$):
- פועל כלפי מטה
- $\overset{*}{m} = \rho x$ היא מסת החלק המשתלשל
- $\overset{*}{m} g = \rho x g \ \mathrm{N}$
-
כוח החיכוך הקינטי ($f_k$):
- פועל בכיוון המתנגד לתנועה (מושך את החבל חזרה)
- $f_k = \mu_k N$ כאשר $N$ הוא הכוח הנורמלי
- $N = \rho (L-x) g$ היא משקל החלק הנמצא על השולחן
- $f_k = \mu_k \rho (L-x) g \ \mathrm{N}$
שלב 2: חישוב הכוח השקול (סכום הכוחות)
הכוח השקול הוא ההפרש בין כוח הכובד המושך את החבל מטה לבין כוח החיכוך המעכב את התנועה:
\[\sum F = \overset{*}{m} g - f_k\]נציב את הביטויים המפורשים:
\[\sum F = \rho x g - \mu_k \rho (L-x) g\]שלב 3: יישום החוק השני של ניוטון
לפי החוק השני של ניוטון, הכוח השקול שווה למכפלת המסה בתאוצה. המסה של כל החבל היא $m = \rho L$, והתאוצה היא $\ddot{x}$:
\[\sum F = m \cdot a\] \[\rho x g - \mu_k \rho (L-x) g = \rho L \cdot \ddot{x}\]שלב 4: פיתוח מתמטי לקבלת המשוואה הדיפרנציאלית
נפתח את המשוואה שלב אחר שלב:
\[\rho L \cdot \ddot{x} = \rho x g - \mu_k \rho (L-x) g\]נחלק את שני האגפים ב־$\rho L$ כדי לבודד את התאוצה $\ddot{x}$:
\[\ddot{x} = \frac{\rho x g - \mu_k \rho (L-x) g}{\rho L}\]נצמצם את $\rho$ באגף ימין:
\[\ddot{x} = \frac{x g - \mu_k (L-x) g}{L}\]נוציא גורם משותף $g$:
\[\ddot{x} = \frac{g}{L} [x - \mu_k (L-x)]\]נפתח את הסוגריים הפנימיים:
\[\ddot{x} = \frac{g}{L} [x - \mu_k L + \mu_k x]\]נכנס איברים:
\[\ddot{x} = \frac{g}{L} [(1 + \mu_k)x - \mu_k L]\]נפתח את הסוגריים שוב:
\[\ddot{x} = \frac{g}{L} (1 + \mu_k) x - \frac{g}{L} \mu_k L\]נפשט:
\[\ddot{x} = \frac{g}{L} (1 + \mu_k) x - \mu_k g \left[\frac{\mathrm{m}}{\mathrm{s}^2}\right]\]סיכום והסבר פיזיקלי
המשוואה הסופית שקיבלנו:
\[\ddot{x} = \frac{g}{L} (1 + \mu_k) x - \mu_k g\]או בניסוח שקול ואולי יפה יותר (שהופיעה במבחן מועד א׳ 2024):
\[\begin{aligned} \ddot{x} &= \frac{g}{L} (1 + \mu_k) x - g \mu_k \\[10pt] &= \frac{g\left(1 + \mu_k\right)}{L} \left(x - \frac{\mu_k L}{1 + \mu_k}\right) \end{aligned}\]משמעות פיזיקלית:
- האיבר הראשון $\frac{g}{L} (1 + \mu_k) x$ מייצג את ההאצה בגלל כוח הכובד וההשפעה של החיכוך על החלק המשתלשל. ככל שהחלק המשתלשל גדל, כך גדלה ההאצה.
- האיבר השני $\mu_k g$ הוא קבוע שלילי המייצג את ההשפעה המעכבת של החיכוך.
כשמגדירים $\omega^2 = \frac{g}{L} (1 + \mu_k)$, מקבלים משוואה דיפרנציאלית בצורה קומפקטית:
\[\ddot{x} = \omega^2 x - \mu_k g\]זוהי משוואה דיפרנציאלית לינארית לא הומוגנית מסדר שני, שהפתרון שלה יהיה סכום של פתרון המשוואה ההומוגנית ופתרון פרטי.
נגדיר $\omega^2 = \frac{g}{L} (1 + \mu_k) \ \text{[1/s²]}$, כך שהמשוואה הסופית היא:
\[\ddot{x} = \omega^2 x - \mu_k g\]זוהי משוואה דיפרנציאלית לא הומוגנית מסדר שני.
פתרון המשוואה הדיפרנציאלית עם חיכוך
הפתרון הכללי למשוואה מסוג זה מורכב מהפתרון של המשוואה ההומוגנית (ללא האיבר הקבוע) ומפתרון פרטי:
\[x(t) = A\cosh(\omega t) + B\sinh(\omega t) + C \,\mathrm{m}\]נציב את הפתרון הפרטי $C$ במשוואה המקורית:
\[\ddot{C} = \omega^2 C - \mu_k g\]מכיוון ש־$C$ הוא קבוע, אז $\ddot{C} = 0$:
\[0 = \omega^2 C - \mu_k g\] \[C = \frac{\mu_k g}{\omega^2} = \frac{\mu_k g}{\frac{g}{L} (1 + \mu_k)} = \frac{\mu_k L}{1 + \mu_k} \,\mathrm{m}\]לכן, הפתרון הכללי:
\[x(t) = A\cosh(\omega t) + B\sinh(\omega t) + \frac{\mu_k L}{1 + \mu_k}\]נשתמש בתנאי ההתחלה כדי למצוא את הקבועים $A$ ו־$B$:
-
תנאי ראשון: $x(0) = x_0$
\[x(0) = A\cosh(0) + B\sinh(0) + \frac{\mu_k L}{1 + \mu_k}\] \[x_0 = A \cdot 1 + 0 + \frac{\mu_k L}{1 + \mu_k}\] \[A = x_0 - \frac{\mu_k L}{1 + \mu_k} \,\mathrm{m}\] -
תנאי שני: $\dot{x}(0) = 0$
\[\dot{x}(t) = A\omega\sinh(\omega t) + B\omega\cosh(\omega t) + 0\] \[\dot{x}(0) = A\omega\sinh(0) + B\omega\cosh(0)\] \[0 = 0 + B\omega \cdot 1\] \[B = 0 \,\mathrm{m}\]
לכן, הפתרון המלא:
\[x(t) = \left(x_0 - \frac{\mu_k L}{1 + \mu_k}\right)\cosh(\omega t) + \frac{\mu_k L}{1 + \mu_k} \,\mathrm{m}\]והמהירות:
\[v(t) = \left(x_0 - \frac{\mu_k L}{1 + \mu_k}\right)\omega\sinh(\omega t) \,\mathrm{m/s}\]תנאי הסף להחלקה
טרם תחילת התנועה, חיכוך סטטי מונע את תנועת החבל. החבל יתחיל להחליק רק כאשר כוח המשיכה של החלק המשתלשל יהיה גדול מכוח החיכוך הסטטי המקסימלי:
\[F_{\text{drag}} > F_{\text{max static friction}}\] \[\rho g x_0 > \mu_s \rho g (L - x_0)\]פישוט:
\[x_0 > \frac{\mu_s L}{1 + \mu_s} \,\mathrm{m}\]זהו תנאי הסף להחלקה: אם החלק המשתלשל ההתחלתי קטן מדי, החבל לא יתחיל בכלל להחליק!
זמן ההחלקה המלאה עם חיכוך
לחישוב זמן ההחלקה המלאה, נציב $x(T) = L$:
\[\left(x_0 - \frac{\mu_k L}{1 + \mu_k}\right)\cosh(\omega T) + \frac{\mu_k L}{1 + \mu_k} = L\]פישוט:
\[\left(x_0 - \frac{\mu_k L}{1 + \mu_k}\right)\cosh(\omega T) = L - \frac{\mu_k L}{1 + \mu_k} = \frac{L}{1 + \mu_k}\] \[\cosh(\omega T) = \frac{\frac{L}{1 + \mu_k}}{x_0 - \frac{\mu_k L}{1 + \mu_k}} = \frac{L}{(1 + \mu_k)(x_0 - \frac{\mu_k L}{1 + \mu_k})}\]ומכאן:
\[T = \frac{1}{\omega}\cosh^{-1}\left(\frac{L}{(1 + \mu_k)(x_0 - \frac{\mu_k L}{1 + \mu_k})}\right) \,\mathrm{s}\] \[T = \sqrt{\frac{L}{g(1+\mu_k)}}\cosh^{-1}\left(\frac{L(1+\mu_k)}{(1+\mu_k)x_0 - \mu_k L}\right) \,\mathrm{s}\]הסבר פיזיקלי להשפעת החיכוך
החיכוך מתנגד לתנועת החבל ומאט את קצב ההחלקה. כתוצאה מכך:
- נדרש ערך מינימלי של $x_0$ כדי שהחבל יתחיל בכלל להחליק. אם $x_0 \leq \frac{\mu_s L}{1 + \mu_s}$, החבל יישאר במנוחה.
- זמן ההחלקה המלאה $T$ גדול יותר בהשוואה למקרה ללא חיכוך, שכן החיכוך מאט את תנועת החבל.
- הפתרון כולל איבר קבוע $\frac{\mu_k L}{1 + \mu_k}$ שמייצג את ההשפעה של החיכוך על דינמיקת המערכת.
- החיכוך גם משנה את ערך $\omega$ (מ־$\sqrt{\frac{g}{L}}$ ל־$\sqrt{\frac{g}{L}(1+\mu_k)}$), מה שמשפיע על קצב הגידול של המהירות וההאצה.
במקרה הגבולי שבו $\mu_k = 0$ (אין חיכוך), נקבל $\omega^2 = \frac{g}{L}$ ו־$C = 0$, והפתרון יהיה זהה לפתרון שמצאנו במקרה הראשון:
\[x(t) = x_0 \cosh(\omega t)\]זה מאשר את נכונות הפתרון הכללי שלנו.
אוסצילטור הרמוני
הגדרת האוסצילטור ההרמוני
נתונה מערכת המורכבת מקיר ורצפה נטולת חיכוך, שעליה מונחת מסה $M$ המחוברת בקפיץ לקיר.

חוק הוק והכוח המחזיר
מבחינה פיזיקלית, קפיץ אידיאלי מפעיל כוח מחזיר ($\mathbf{F}$) כאשר הוא נמתח או נדחס. לפי חוק הוק, כוח זה פרופורציונלי (יחסי) להעתק ($\Delta x$) של הקפיץ ממצב שיווי המשקל שלו.
באופן וקטורי (בתלת־ממד), הכוח מתואר על ידי:
\[\mathbf{F} = -k \cdot \mathbf{r}\]כאשר:
- $\mathbf{F}$ הוא הכוח המחזיר.
- $k$ הוא קבוע הקפיץ, המבטא את קשיחותו. יחידותיו הן ניוטון למטר ($\mathrm{N/m}$). ככל ש־$k$ גדול יותר, הקפיץ קשיח יותר.
- $\mathbf{r}$ הוא וקטור ההעתק מנקודת שיווי המשקל.
הסימן השלילי מציין שהכוח פועל תמיד בכיוון המנוגד להעתק, כלומר, הוא שואף להחזיר את המערכת למצב שיווי משקל.
במקרה של תנועה בממד אחד, ניתן לכתוב את חוק הוק בצורה סקלרית:
\[F_x = -k \cdot x\]במודל זה, מניחים כי נקודת שיווי המשקל היא ב־$x=0$, שם הכוח מתאפס. במערכות פיזיקליות רבות, כמו תנודות של אטומים בסריג גבישי, נקודת שיווי המשקל היא נקודה יציבה שסביבה מתרחשות התנודות, והכוח המחזיר פרופורציונלי להסטה מנקודה זו.
במקרים של קפיץ בעל אורך רפוי $x_0$ שונה מאפס, הנוסחה תהיה:
\[F_x = -k \cdot (x - x_0)\]כאשר $x_0$ הוא האורך הרפוי. הכוח מתאפס כאשר $x = x_0$.
המשוואה הדיפרנציאלית של האוסצילטור ההרמוני
לצורך פיתוח המשוואה, נניח אורך רפוי אפס ($x_0 = 0$). לפי החוק השני של ניוטון:
\[\mathbf{F} = m\mathbf{a} = m \ddot{\mathbf{x}}\]הכוח הפועל על המסה הוא כוח הקפיץ:
\[\mathbf{F} = -k \mathbf{x}\]מהשוואת שני הביטויים לכוח, מתקבל:
\[-k x = m \ddot{x}\]לאחר סידור מחדש, מקבלים את המשוואה הדיפרנציאלית של התנועה:
\[\ddot{x} = -\frac{k}{m} x\]נהוג להגדיר את התדירות הזוויתית $\omega$ של המערכת:
\[\omega^2 = \frac{k}{m}\]כך שהמשוואה מקבלת את הצורה הקנונית:
\[\ddot{x} = -\omega^2 x\]זוהי משוואת האוסצילטור ההרמוני הפשוט. מערכת המתוארת על ידי משוואה זו נקראת “מתנד (אוסצילטור) הרמוני”. תנודות הרמוניות הן תנודות מחזוריות המתוארות על ידי פונקציות סינוס וקוסינוס. למודל זה חשיבות יסודית בפיזיקה, והוא משמש לתיאור מגוון רחב של תופעות, מתנודות אטומים במולקולות ועד למעגלים חשמליים.
פתרון המשוואה הדיפרנציאלית של האוסצילטור ההרמוני
המשוואה הדיפרנציאלית $\ddot{x} = -\omega^2 x$ היא משוואה לינארית, הומוגנית, מסדר שני, עם מקדמים קבועים. הפתרון הכללי שלה הוא צירוף לינארי של פונקציות שנגזרתן השנייה היא מינוס הפונקציה עצמה (כפול קבוע). פונקציות אלו הן סינוס וקוסינוס.
הפתרון הכללי הוא:
\[x(t) = A \cos(\omega t) + B \sin(\omega t) \quad [\mathrm{m}]\]כאשר $A$ ו־$B$ הם קבועים הנקבעים על פי תנאי ההתחלה של המערכת (מיקום ומהירות בזמן $t=0$).
קביעת הקבועים באמצעות תנאי התחלה
נניח שבזמן $t=0$, מיקום המסה הוא $x(0) = x_0$ ומהירותה היא $v(0) = v_0$.
-
קביעת A (מצב התחלתי): נציב $t=0$ בפתרון הכללי:
\(x(0) = x_0 = A\underbrace{\cos(0)}_{=1} + B\underbrace{\sin(0)}_{=0} = A\) מכאן נובע:
\[\boxed{A = x_0}\] -
קביעת B (מהירות התחלתית):
נגזור את $x(t)$ כדי לקבל את המהירות $v(t)$:
\[v(t) = \frac{dx}{dt} = -A\omega\sin(\omega t) + B\omega\cos(\omega t)\]נציב $t=0$:
\[v(0) = v_0 = -A\omega\underbrace{\sin(0)}_{=0} + B\omega\underbrace{\cos(0)}_{=1} = B\omega\]מכאן נובע:
\[\boxed{B = \frac{v_0}{\omega}}\]
הפתרון המלא עבור תנאי ההתחלה הנתונים הוא:
\[\boxed{x(t) = x_0\cos(\omega t) + \frac{v_0}{\omega}\sin(\omega t)}\]צורה אלטרנטיבית של הפתרון: אמפליטודה ופאזה
ניתן לבטא את הפתרון גם בצורה של פונקציית קוסינוס (או סינוס) בודדת עם הזזת פאזה:
\[x(t) = C\cos(\omega t + \phi)\]כאשר $C$ היא האמפליטודה (משרעת) של התנודה, ו־$\phi$ היא זווית המופע (פאזה).
באמצעות הזהות הטריגונומטרית:
\[\cos(a+b) = \cos(a)\cos(b) - \sin(a)\sin(b)\]ניתן לקשר בין שתי הצורות של הפתרון:
\[x(t) = C\cos(\phi)\cos(\omega t) - C\sin(\phi)\sin(\omega t)\]מהשוואת מקדמים עם הפתרון $x(t) = A \cos(\omega t) + B \sin(\omega t)$, מקבלים:
\[A = C\cos(\phi) \quad \text{and} \quad B = -C\sin(\phi)\]מכאן ניתן לחלץ את $C$ ו־$\phi$:
-
אמפליטודה (C):
\[A^2 + B^2 = C^2\cos^2(\phi) + C^2\sin^2(\phi) = C^2(\cos^2\phi + \sin^2\phi) = C^2\] \[C = \sqrt{A^2 + B^2} = \sqrt{x_0^2 + \left(\frac{v_0}{\omega}\right)^2}\]האמפליטודה מייצגת את ההעתק המרבי של הגוף מנקודת שיווי המשקל. התנועה חסומה בתחום $[-C, +C]$.
-
זווית פאזה ($\phi$):
\[\frac{B}{A} = \frac{-C\sin(\phi)}{C\cos(\phi)} = -\tan(\phi)\] \[\phi = \arctan\left(-\frac{B}{A}\right) = \arctan\left(-\frac{v_0}{\omega x_0}\right)\]
זמן המחזור של התנודה
התנודה ההרמונית היא מחזורית. זמן המחזור ($T$) הוא הזמן הדרוש להשלמת תנודה מלאה אחת. הוא מתקיים כאשר הארגומנט של הפונקציה הטריגונומטרית גדל ב־$2\pi$:
\[\omega T = 2\pi\]לכן, זמן המחזור הוא:
\[T = \frac{2\pi}{\omega} = 2\pi\sqrt{\frac{m}{k}}\]זמן המחזור תלוי רק במסת הגוף ובקבוע הקפיץ, ואינו תלוי באמפליטודה של התנודה (עבור תנודות קטנות).
סיכום
המתנד ההרמוני הוא מודל פיזיקלי בסיסי המתאר תנודה סביב נקודת שיווי משקל יציבה. התנועה היא הרמונית, כלומר מתוארת על ידי פונקציות סינוס וקוסינוס. המאפיינים העיקריים של התנועה הם:
- תדירות זוויתית ($\omega$): קובעת את מהירות התנודה.
- אמפליטודה ($C$): ההעתק המרבי מנקודת שיווי המשקל.
- זמן מחזור ($T$): הזמן להשלמת תנודה אחת.
האלגנטיות והפשטות של המודל הופכות אותו לכלי חיוני בניתוח מערכות פיזיקליות מורכבות רבות.
שאלות ותשובות נפוצות
שאלה: מדוע $\omega^2 = \frac{k}{m}$?
תשובה: הגדרה זו נובעת מצורת המשוואה הדיפרנציאלית $\ddot{x} = -(\frac{k}{m})x$. סימון $\frac{k}{m}$ כ־$\omega^2$ מפשט את צורת המשוואה ומדגיש את הקשר לתדירות התנודה. בכל גזירה של פונקציית הפתרון ($\sin(\omega t)$ או $\cos(\omega t)$), הגורם $\omega$ “יוצא החוצה” לפי כלל השרשרת, כך שבגזירה שנייה מתקבל גורם של $\omega^2$.
שאלה: מדוע הפתרון הכללי דורש גם סינוס וגם קוסינוס?
תשובה: משוואה דיפרנציאלית מסדר שני דורשת שני פתרונות בלתי תלויים לינארית כדי לבנות פתרון כללי. סינוס וקוסינוס הם שני פתרונות כאלה. הצירוף הלינארי של שניהם מאפשר לפתרון לעמוד בכל זוג תנאי התחלה אפשריים (מיקום ומהירות). במקרים פרטיים, אחד המקדמים ($A$ או $B$) עשוי להתאפס, אך הפתרון הכללי חייב לכלול את שתי האפשרויות.
שאלה: מהן היחידות של $\omega$?
תשובה: היחידות של $\omega$ הן רדיאנים לשנייה ($\mathrm{rad/s}$). מכיוון ש־$\omega^2 = k/m$, יחידותיו הן $(\mathrm{N/m})/\mathrm{kg} = (\mathrm{kg \cdot m/s^2}/m)/\mathrm{kg} = 1/\mathrm{s}^2$. לכן, היחידות של $\omega$ הן $1/\mathrm{s}$. התדירות הרגילה ($f$), הנמדדת בהרץ (Hz), קשורה לתדירות הזוויתית על ידי $f = \omega / (2\pi)$.
שאלה: האם המסה $m$ היא של הקפיץ או של הגוף?
תשובה: במודל האוסצילטור ההרמוני הפשוט, $m$ היא מסת הגוף המתנדנד. מניחים שהקפיץ הוא “חסר מסה” (מסת הקפיץ זניחה ביחס למסת הגוף).
דור פסקל