שאלה מקדימה: פיתוח וקטורי המקום, המהירות והתאוצה בקואורדינטות פולריות
וקטור המקום בקואורדינטות קרטזיות הוא:
\[\vec{r} = x \hat{x} + y \hat{y}\]אם נשתמש בקואורדינטות פולריות $(r,\theta)$, נוכל לכתוב את וקטור המקום כך:
\[\vec{r} = r \cdot \cos \left(\theta\right) \hat{x} + r \cdot \sin \left(\theta\right) \hat{y}\]בכתיבה שמדגישה את התלות בזמן $\theta(t)$:
\[\vec{r}(t) = r(t) \cdot \cos \left(\theta(t)\right) \hat{x} + r(t) \cdot \sin \left(\theta(t)\right) \hat{y}\]מכאן שוקטור היחידה הוא:
\[\boxed{\hat{r}(t) = \cos \left(\theta(t)\right) \hat{x} + \sin \left(\theta(t)\right) \hat{y}}\]הווקטור הזה הוא בכיוון וקטור הרדיוס שמתחיל בראשית ומציע לעבר המיקום המדובר.
וקטור היחידה הפולארי השני הוא $\hat{\theta}$, המכוון בניצב לוקטור $\hat{r}$:
\[\boxed{\hat{\theta}(t) = -\sin \left(\theta(t)\right) \hat{x} + \cos \left(\theta(t)\right) \hat{y}}\]אפשר לוודא על ידי מכפלה סקלרית.
בכתיב מקוצר:
\[\boxed{\hat{r} = \cos \theta \hat{x} + \sin \theta \hat{y}, \quad \hat{\theta} = -\sin \theta \hat{x} + \cos \theta \hat{y}}\]לפי כלל השרשרת:
\[\frac{d\hat{r}}{dt} = \dot{\theta} \hat{\theta} \implies \boxed{\frac{d\hat{r}}{dt} = \dot{\theta} \hat{\theta}}\] \[\frac{d\hat{\theta}}{dt} = -\dot{\theta} \hat{r} \implies \boxed{\frac{d\hat{\theta}}{dt} = -\dot{\theta} \hat{r}}\]חישוב המהירות ורכיביה הפולאריים:
\[\begin{aligned} \vec{r} &= r \cos \theta \hat{x} + r \sin \theta \hat{y} = r \hat{r} \\[10pt] \vec{v} &= \frac{d\vec{r}}{dt} = \dot{r} \hat{r} + r \frac{d\hat{r}}{dt} = \dot{r} \hat{r} + r \dot{\theta} \hat{\theta} \end{aligned}\] \[\implies \boxed{\vec{v} = \dot{r} \hat{r} + r \dot{\theta} \hat{\theta}}\]חישוב התאוצה ורכיביה הפולאריים:
\[\begin{aligned} \vec{a} &= \frac{d\vec{v}}{dt} = \ddot{r} \hat{r} + \dot{r} \frac{d\hat{r}}{dt} + r \frac{d}{dt}(\dot{\theta} \hat{\theta}) \\[10pt] &= \ddot{r} \hat{r} + \dot{r} \dot{\theta} \hat{\theta} + r \left(\ddot{\theta} \hat{\theta} + \dot{\theta} \frac{d\hat{\theta}}{dt}\right) \\[10pt] &= \ddot{r} \hat{r} + \dot{r} \dot{\theta} \hat{\theta} + r \left(\ddot{\theta} \hat{\theta} - \dot{\theta}^2 \hat{r}\right) \\[10pt] &= \left(\ddot{r} - r \dot{\theta}^2\right) \hat{r} + \left(r \ddot{\theta} + 2 \dot{r} \dot{\theta}\right) \hat{\theta} \end{aligned}\] \[\boxed{\vec{a} = \left(\ddot{r} - r \dot{\theta}^2\right) \hat{r} + \left(r \ddot{\theta} + 2 \dot{r} \dot{\theta}\right) \hat{\theta}}\] \[\boxed{a_r = \ddot{r} - r \dot{\theta}^2, \quad a_\theta = r \ddot{\theta} + 2 \dot{r} \dot{\theta}}\]שאלה 1: השפעת סיבוב כדור הארץ על המשקל
העריכו כיצד משפיעה התנועה הסיבובית של כדור הארץ על הערך שיראה מד המשקל? האם זה קשור למיקום על פני כדור הארץ?
הערה: רדיוס כדור הארץ הוא כ־6300 קילומטר וזמן מחזור סיבובו סביב ציר הסיבוב שלו הוא כ־24 שעות (קצת פחות, למה?)
במערכת הייחוס הסובבת עם כדור הארץ, הכוחות הפועלים על אדם העומד על פני כדור הארץ הם:
- כוח הכבידה: $mg$ הפועל לכיוון מרכז כדור הארץ
- כוח הנורמלי מהקרקע: $N$ הפועל מאונך למשטח
- כוח צנטריפוגלי: $m\omega^2 r$ הפועל בכיוון רדיאלי החוצה מציר הסיבוב
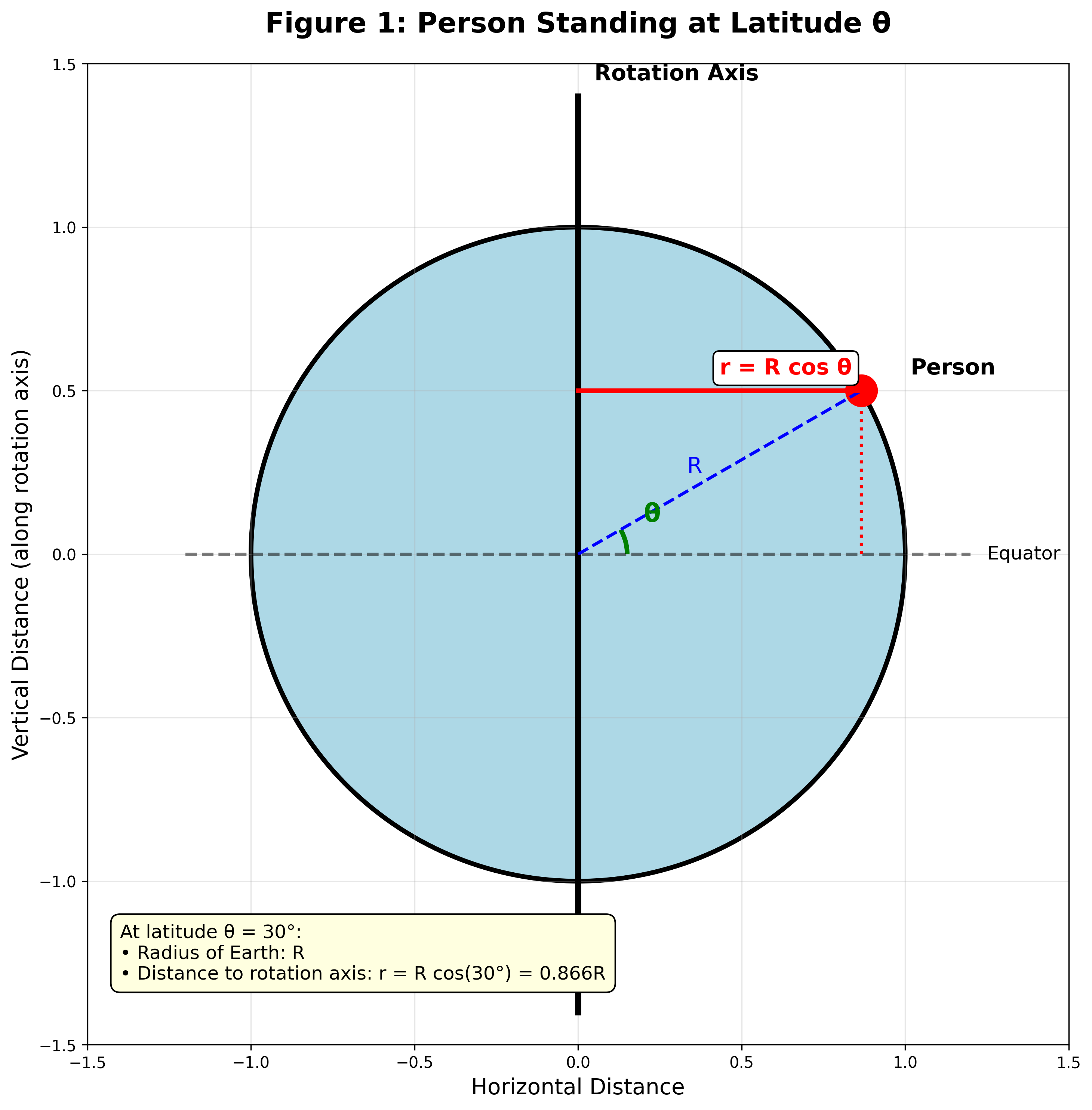
עבור אדם הנמצא בקו רוחב $\theta$, רדיוס הסיבוב סביב ציר כדור הארץ הוא:
\[\boxed{r = R_E \cos\theta}\]הכוח הצנטריפוגלי החוצה מציר הסיבוב הוא:
\[F_{cf,\;vertical} = m\omega^{2}R_E\cos^{2}\theta\]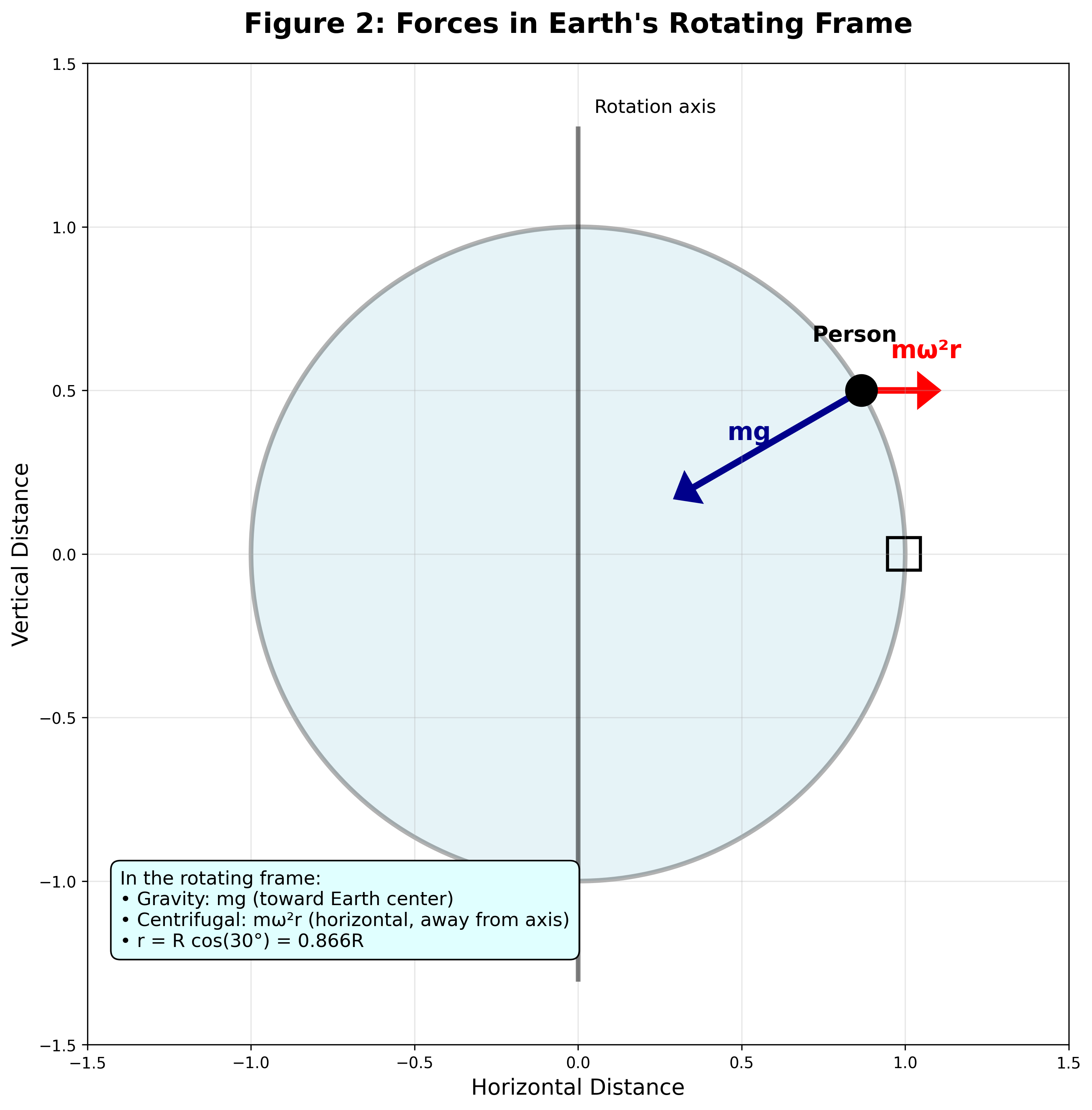
כאשר מפרקים את הכוח הצנטריפוגלי לרכיבים:
- רכיב רדיאלי (ממרכז כדור הארץ לכיוון האדם והחוצה ↗): $m\omega^2 R_E \cos\theta \cdot \cos\theta = m\omega^2 R_E \cos^2\theta$
- רכיב טנגנציאלי (משיק לציר הריאלי ↖): $m\omega^2 R_E \cos\theta \cdot \sin\theta$
מכיוון שהכוח הצנטריפוגלי קטן מאוד ביחס לכוח הכבידה (~0.3%), ניתן לבצע קירוב ולהתייחס רק להשפעה על הרכיב האנכי של התאוצה האפקטיבית. כלומר, להתמקד בציר הרדיאלי ממרכז כדור הארץ (↖). בפתרון שהיה בדפי התרגול התייחסו גם לכוח החיכוך בציר הזה, למרות שלהבנתי מיותר.
הכוחות שפועלים בציר הזה הם $mg$ כלפי מטה ו־$N$ כלפי מעלה - ביחד עם ההיטל של הכוח הצנטריפוגלי, שהוא:
\[\begin{aligned} F_{cf, vertical} &= \cos \left( \theta\right) m\omega^2r \\[10pt] &= m\omega^2 R_E \cos^2\theta \end{aligned}\]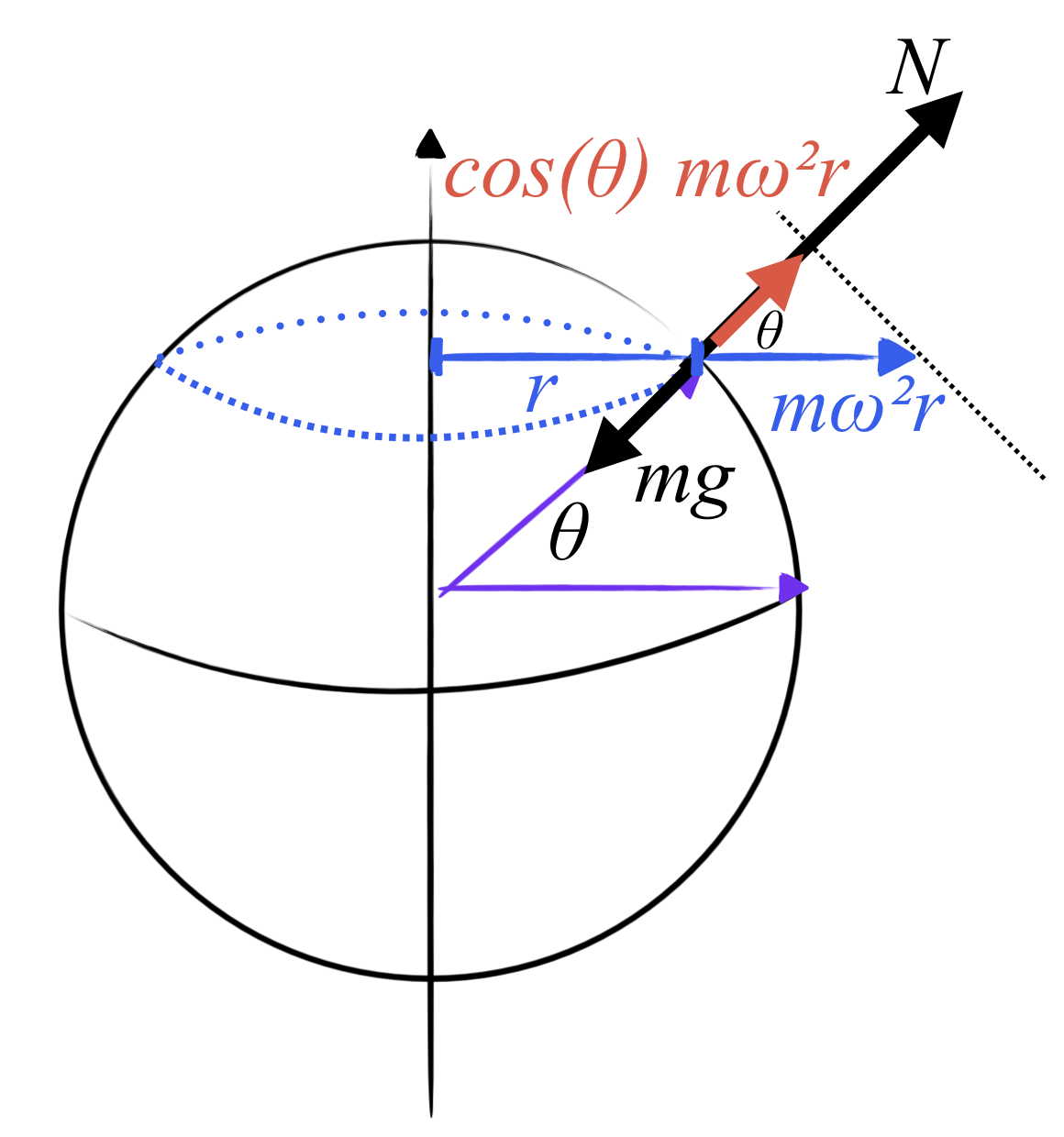
לפי החוק השני של ניוטון במערכת לא אינרציאלית:
\[N + m\omega^2 R_E \cos^2\theta = mg\]מכאן, הירידה במשקל הנמדד ביחס למשקל “האמיתי” היא:
\[\boxed{\Delta W = mg - N = m\omega^2 R_E \cos^2\theta}\]עבור כדור הארץ:
\[\omega = \frac{2\pi}{T} = \frac{2\pi}{24 \mathrm{h} \cdot 3600 \mathrm{s/h}} = \frac{2\pi}{86,400 \mathrm{s}} \approx 7.27 \times 10^{-5} \, \mathrm{rad/s}\] \[R_E \approx 6300 \mathrm{km} = 6.3 \times 10^6 \, \mathrm{m}\]בקו המשווה ($\theta = 0°$):
\[\frac{\Delta W}{W} = \frac{m\omega^2 R_E \cos^2(0°)}{mg} = \frac{\omega^2 R_E}{g} \approx \frac{(7.27 \times 10^{-5})^2 \cdot 6.3 \times 10^6}{10 \mathrm{m/s}^2} \approx 0.0033\]בקוטב ($\theta = 90°$):
\[\frac{\Delta W}{W} = \frac{m\omega^2 R_E \cos^2(90°)}{mg} = 0\]מסקנות:
- ההשפעה מקסימלית בקו המשווה (ירידה של בערך 0.33% במד המשקל)
- ההשפעה מתאפסת בקטבים ($\theta = 90°$)
- בקו רוחב 45° הירידה בכ־0.17%
שאלה 2: חוט מחליק (חבל משתלשל) עם כוחות מעכבים
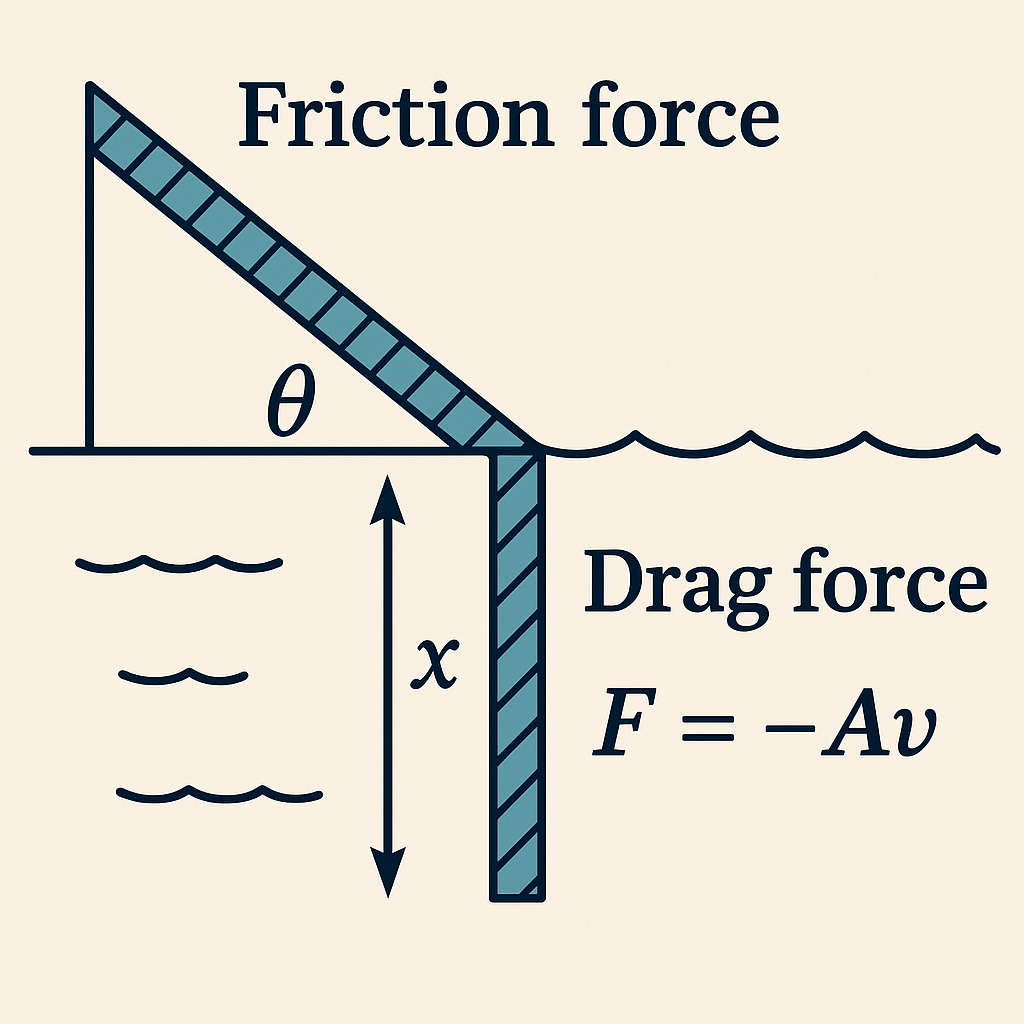
המערכת הבאה משוחררת ממנוחה כמתואר באיור. צפיפות החבל אחידה ומסתו $M$ ואורך החבל $\ell$. הזווית של המישור המשופע היא $\theta$.
בתוך המים יש כוח גרר כמתואר באיור ($A$ נתון). על המישור המשופע יש כוח חיכוך. כתבו משוואה דיפרנציאלית המתארת את התנועה. בדקו את מקרה הקצה $\theta=\frac{\pi}{2}$ ואין כוח גרר.
נערוך פירוק כוחות לכל חלק בנפרד, כי כל חלק של החבל חווה כוחות שונים. היחס בין 2 החלקים משתנה.
משקל החוט שבתוך המים:
\[\frac{x}{\ell} \cdot M\]משקל החוט שמעל המים:
\[\left(\frac{\ell - x}{\ell}\right) \cdot M\]משוואת הכוחות על החלק שבתוך המים בכיוון הנפילה היא (↓):
\[\begin{aligned} \underbrace{\frac{x}{\ell} \cdot M}_{\text{mass of fallig part}} a_{\text{falling}} &= \sum F_{\text{falling}} \\[10pt] &= \frac{x}{\ell} \cdot M g - \underbrace{Av}_{\text{drag}} - T \\[10pt] \frac{x}{\ell} M \ddot{x} &= \frac{x}{\ell} M g - A\dot{x} - T \end{aligned}\]נסמן:
\[\boxed{\frac{x}{\ell} M \ddot{x} = \frac{x}{\ell} M g - A\dot{x} - T}\tag{1}\]משוואת הכוחות על החלק שעל ״המגלשה״ בכיוון הנפילה (↘):
\[\underbrace{\left(\frac{\ell - x}{\ell}\right) \cdot M}_{\text{mass of sliding part}} a_{\text{sliding}} = \sum F_{\text{sliding}}\] \[= T - f_k + \left(\frac{\ell - x}{\ell}\right) \cdot M g \cdot \sin \theta\]נסמן:
\[\boxed{\left(\frac{\ell - x}{\ell}\right) M \ddot{x} = T - f_k + \left(\frac{\ell - x}{\ell}\right) M g \cdot \sin \theta} \tag{2}\]מתוך סכום הכוחות הניצבים לכיוון הגלישה נוכל לקבל משוואה נוספת (↗):
\[0 = \sum F_{\text{normal}} = N - \left(\frac{\ell - x}{\ell}\right) \cdot M g \cdot \cos \theta\]מסיקים:
\[\boxed{N = \left(\frac{\ell - x}{\ell}\right) \cdot M g \cdot \cos \theta}\]כוח החיכוך הדינמי הוא $f_k = \mu_k N$, כאשר $\mu_k$ הוא מקדם החיכוך הדינמי. נחבר את $N$ שקיבלנו למשוואה זו:
\[\boxed{f_k = \mu_k N = \mu_k \left(\frac{\ell - x}{\ell}\right) \cdot M g \cdot \cos \theta}\]נציב את $f_k$ במשוואת הכוחות בכיוון הגלישה (2):
\[\left(\frac{\ell - x}{\ell}\right) M \ddot{x} = T - \mu_k \left(\frac{\ell - x}{\ell}\right) M g \cdot \cos \theta + \left(\frac{\ell - x}{\ell}\right) M g \cdot \sin \theta \tag{2}\]סך הכל קיבלנו שתי משוואות:
\[\boxed{\frac{x}{\ell} M \ddot{x} = \frac{x}{\ell} M g - A\dot{x} - T}\tag{1}\] \[\boxed{\left(\frac{\ell - x}{\ell}\right) M \ddot{x} = T - \mu_k \left(\frac{\ell - x}{\ell}\right) M g \cdot \cos \theta + \left(\frac{\ell - x}{\ell}\right) M g \cdot \sin \theta} \tag{2}\]נחבר את שתי המשוואות (1) ו־(2) כדי להיפטר מהכוח $T$:
\[\begin{aligned} \frac{x}{\ell} M \ddot{x} +& \left(\frac{\ell - x}{\ell}\right) M \ddot{x} =\\[10pt] \frac{x}{\ell} M g &- A\dot{x} - \mu_k \left(\frac{\ell - x}{\ell}\right) M g \cdot \cos \theta \\[10pt] &+ \left(\frac{\ell - x}{\ell}\right) M g \cdot \sin \theta \end{aligned}\]נפתח את המשוואה:
\[M\ddot{x} \left(\frac{x + \ell - x}{\ell}\right) = \frac{x}{\ell} M g - A\dot{x} - \mu_k \left(\frac{\ell - x}{\ell}\right) M g \cdot \cos \theta + \left(\frac{\ell - x}{\ell}\right) M g \cdot \sin \theta\]נפשט את המשוואה:
\[M\ddot{x} = \frac{x}{\ell} M g - A\dot{x} - \mu_k \left(\frac{\ell - x}{\ell}\right) M g \cdot \cos \theta + \left(\frac{\ell - x}{\ell}\right) M g \cdot \sin \theta\]נחלק ב־$M$:
\[\ddot{x} = \frac{x}{\ell} g - \frac{A}{M}\dot{x} - \mu_k \left(\frac{\ell - x}{\ell}\right) g \cdot \cos \theta + \left(\frac{\ell - x}{\ell}\right) g \cdot \sin \theta\] \[\boxed{\ddot{x} = \frac{x}{\ell} g - \frac{A}{M}\dot{x} - \mu_k \left(\frac{\ell - x}{\ell}\right) g \cdot \cos \theta + \left(\frac{\ell - x}{\ell}\right) g \cdot \sin \theta}\]נבדוק מה קורה כאשר $\theta = \frac{\pi}{2}$ וללא כוח גרר עם המים - כלומר, כאשר החוט נופל בנפילה חופשית. נקווה שבמצב כזה יתקיים $M\ddot{x} = Mg$.
במצב זה, נציב $\theta = \frac{\pi}{2}$, כלומר $\cos \theta = 0$ ו־$\sin \theta = 1$. כמו כן, נניח שאין כוח גרר, כלומר $A = 0$. אז המשוואה תהפוך ל:
\[\ddot{x} = \frac{x}{\ell} g - 0 - 0 + \left(\frac{\ell - x}{\ell}\right) g\] \[\ddot{x} = \frac{x}{\ell} g + \left(\frac{\ell - x}{\ell}\right) g\] \[\ddot{x} = \frac{g}{\ell} (x + \ell - x) = \frac{g}{\ell} \ell = g\] \[\boxed{\ddot{x} = g}\]כך שהאצה של החוט היא $g$, כלומר הוא נופל בנפילה חופשית, כפי שציפינו.
שאלה 3: מכונת ארטווד
נתונה המערכת באיור. המסה $M$ יכולה לנוע אנכית. המסה $m$ יכולה לנוע לכל כיוון.
נתון $m = M$.
כתבו מערכת משוואות המתארות את התנועה של מרחק המסה $m$ מציר הסיבוב (הרדיוס) והזווית.
השתמשו בקירוב של זוויות קטנות.
האם יכולות להיות תנודות כאשר הרדיוס קבוע?

חלק א׳: משוואות התנועה

על המסה השמאלית (שמקובעת רק לציר ה־$y$) פועלים כוחות:
- כוח הכבידה $Mg$ כלפי מטה (בחרנו את כיוון $y$ כלפי מטה ומכאן $g$ חיובי)
- מתיחות החוט $T$ כלפי מעלה נגד ציר $y$
לכן, לפי החוק השני של ניוטון:
\[ma_y = \sum F_y = mg - T\]על המסה הימנית (שיכולה לנוע לכל כיוון) נחיל מערכת צירים פולארית.
בציר הרדיאלי (מהחיבור לתקרה - חיובי כלפי המסה מטה):
\[ma_r = \sum F_r = mg \cos \theta - T = m\left(\ddot{r} - r \dot{\theta}^2\right)\]בציר הטנגנציאלי (בניצב לציר הרדיאלי, חיובי בכיוון התנועה):
\[ma_\theta = \sum F_\theta = mg \sin \theta = m\left(r \ddot{\theta} + 2 \dot{r} \dot{\theta}\right)\]נבחין שמתחקיים :
\[\Delta y = \Delta r\]כי המתיחות בחוט נשמרת. נזכיר ש$r$ הוא המרחק מהמסה הימנית לציר הסיבוב, כלומר אורך החוט. מכאן ש:
\[\boxed{a_y=\ddot{r}}\]קיבלנו שלוש משוואות בקואורדינטות פולריות בשלושה נעלמים: $T$, $r$ ו־$\theta$.
\[\begin{align} m\ddot{r} & = mg-T \tag{1} \\[10pt] m\left(\ddot{r} - r \dot{\theta}^2\right) &= mg \cos \left(\theta\right) = T \tag{2} \\[10pt] m\left(r \ddot{\theta} + 2 \dot{r} \dot{\theta}\right) &= mg \sin \theta \tag{3} \end{align}\]נחלץ את $T$ מהמשוואה (1) ונציב אותו במשוואה (2):
\[T = m\left(g - \ddot{r}\right)\]נציב את $T$ במשוואה (2):
\[\cancel{m}\left(\cancel{\ddot{r}} - r \dot{\theta}^2\right) = mg \cos \theta - \cancel{m}\left(g - \cancel{\ddot{r}}\right)\]נחבר את משוואות (1) ו־(2):
\[\boxed{ \begin{aligned} -r\dot{\theta}^2 &= g(\cos \theta - 1) \\[10pt] r\ddot{\theta}^2 + 2\dot{r}\dot{\theta} &= g \sin \theta \end{aligned}}\]זו התשובה הסופית שמתארת את התנועה במשתנים הקינמטיים $r$ ו־$\theta$.
חלק ב׳: קירוב של זוויות קטנות
מטורי טיילור:
\[\begin{cases} \cos \theta -1 \approx - \frac{\theta^2}{2} \\[10pt] \sin \theta \approx \theta \end{cases}\]נציב את הקירובים במשוואות:
\[\boxed{ \begin{aligned} -r\dot{\theta}^2 &= -\frac{g\theta^2}{2} \\[10pt] r\ddot{\theta} + 2\dot{r}\dot{\theta} &= g \theta \end{aligned} }\]חלק ג׳: האם יכולות להיות תנודות כאשר הרדיוס קבוע?
השאלה האם תתכן תנועה זוויתית כאשר $r$ קבוע שואלת האם ייתכן כי $\dot{r} = \dot{r} = 0$ וכן $\dot{theta} \neq 0, \, \ddot{\theta} \neq 0$.
המתרגל פיתח את המשוואות הקודמות לביטוי של $\theta$:
\[\boxed{ \begin{aligned} -r\dot{\theta}^2 &= -\frac{g\theta^2}{2} \\[10pt] \theta = \pm \sqrt{\frac{2r}{g}} \dot{\theta}^2 \\[10pt] \end{aligned}}\]הוא הציב את הביטוי הזה במשוואה השנייה וקיבל שכאשר $\dot{r} = 0$ ו־$\ddot{\theta} \neq 0$, מתקיים:
\[\boxed{ \begin{aligned} r\ddot{\theta} + 2\underbrace{\dot{r}}_{=0}\dot{\theta} &= g \theta \\[10pt] r\ddot{\theta} &= \pm g \cdot \sqrt{\frac{2r}{g}} \dot{\theta}^2 \end{aligned}}\]למשוואה הזאת יש פתרון, מכאן שייתכנו תנודדות מטוטלת גם כאשר 2 המסות לא עולות ויורדות.
דור פסקל